
RC Hovercraft
A zippy, little home-brew hovercraft controlled via a joystick shield, a couple Arduino Unos, and XBee Wireless RF modules.
As a final project for ES50: Introduction to Electrical Engineering, two classmates and I chose to build a radio-controlled hovercraft. Mechanical and electrical design of the craft consisted of two 8-inch RC plane propellors (drive and lift) each coupled to brushless Outrunner 1450kv motors (generally used for RC model aircraft), controlled by 30 amp ESCs connected to PWM pins of an onboard Arduino Uno and powered by 2200mAh 14V battery. The lift fan inflated a plastic skirt and caused the entire craft to hover a few millimeters above the ground. The front-mounted drive fan could pull the craft along at speed up to 4 m/s. A servo controlled an arm-mounted rear wheel that allowed the craft to move straight and steer. Components were mounted on a laser-cut acrylic chassis.
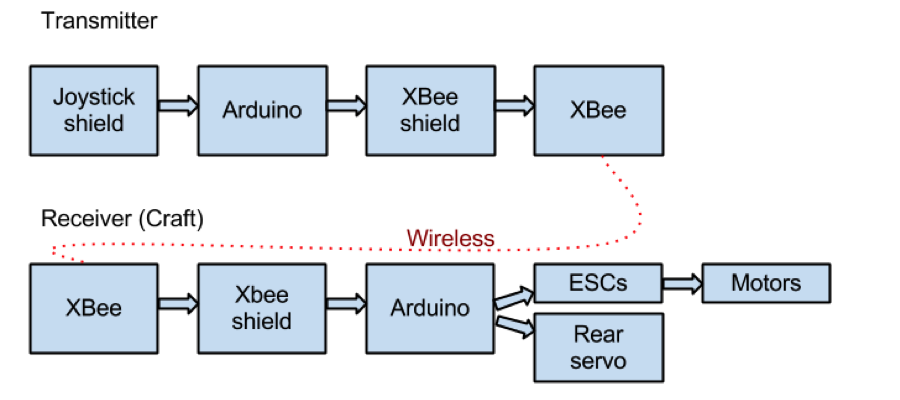
Drive and steer controls were mapped from the x- and y-coordinates of an analog joystick shield. Hover function was controlled by a button. The joystick shield values were fed into an original algorithm on an Arduino Uno, and sent from the transmitter's XBee Wireless 2.4 GHz RF module to a receiving one on the craft and then interpreted by the craft's Arduino. RF range was >100 ft.
Ultimately, the craft performed up to expectations, except for the steering. The back wheel was not heavy enough to provide ample friction with the ground to steer. The servo we had on hand would not have been powerful enough to be able to turn a heavier wheel. With a heftier servo, I believe that the steering can be made to perform properly.
Drive and steer controls were mapped from the x- and y-coordinates of an analog joystick shield. Hover function was controlled by a button. The joystick shield values were fed into an original algorithm on an Arduino Uno, and sent from the transmitter's XBee Wireless 2.4 GHz RF module to a receiving one on the craft and then interpreted by the craft's Arduino. RF range was >100 ft.
Ultimately, the craft performed up to expectations, except for the steering. The back wheel was not heavy enough to provide ample friction with the ground to steer. The servo we had on hand would not have been powerful enough to be able to turn a heavier wheel. With a heftier servo, I believe that the steering can be made to perform properly.
Take a look at our team's final report:
| RC Hovercraft Final Report |
© Ishan Chatterjee 2020
