
Motion Capture Suit
A lower body suit that uses elastic displacement sensors to determine leg position.
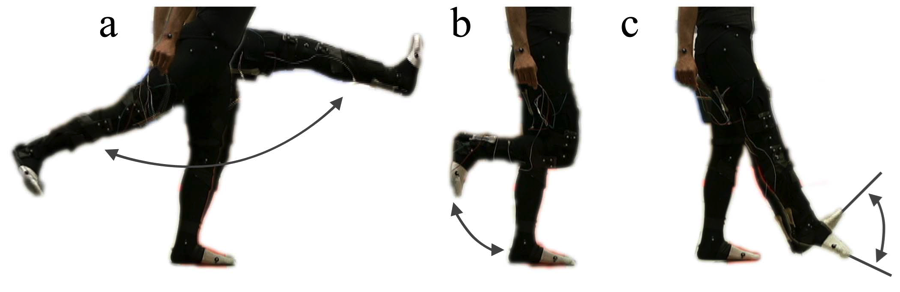
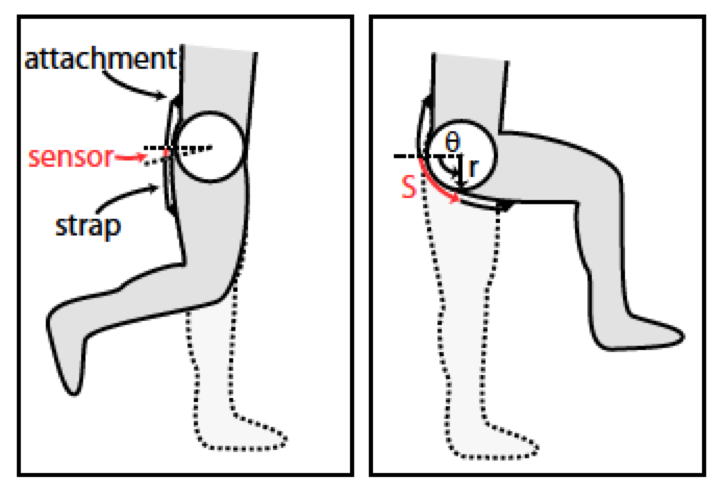
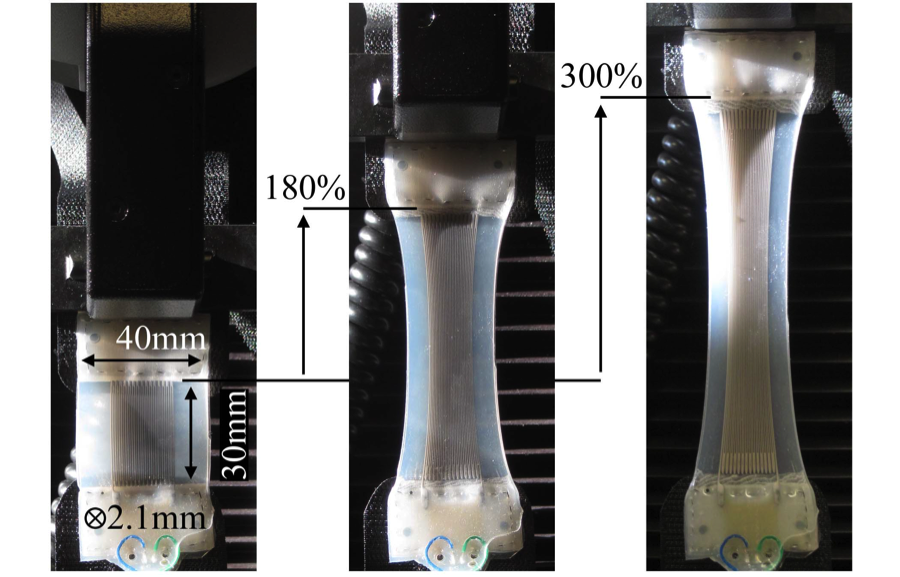
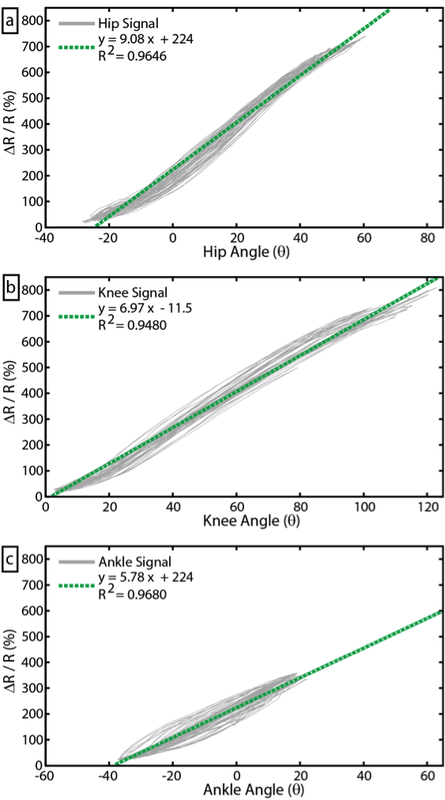
While at the Harvard Biodesign Lab, I worked on a unique motion capture suit developed by Yiğit Mengüç, a postdoctoral fellow at the Harvard Microrobotics Lab. The suit allows for motion capture of lower limbs in the sagittal plane without the limitations of current motion capture technology: the need for placement of reflective tags on the subject, confinement to a room outfitted with specialized IR cameras, and the requirement for prolonged, heavy computational analysis. The suit is comprised of hyperelastic strain sensors placed across the hip, knee, and ankle joints and is used to measure joint angle. Developed in the lab, the strain sensor changes electrical resistance as a function of its change in length. As the sensors were placed on the outer radius of a joint, strain of the sensor could be used to estimate joint angle with little computation, allowing for low latency estimates of leg position relative to the subject's trunk. A pair of polyester and spandex running tights serves as a base to which components attach. The suit is low-profile, inexpensive, completely soft, and can operate without being confined to a specially outfitted motion capture studio, bringing motion capture out to the tracks, rehabilitation clinics, or battlefields.
While on the project, I used MATLAB to determine and display a real-time 3D visualization of the user’s leg position. The program was used during a demonstration of suit to the project's DARPA funding manager. I fabricated many components of the second generation of the sensor suit, making design decisions to improve on the issues the first generation suit faced. Finally, I conducted biomechanics research and developed a calibration procedure for the sensing suit to improve accuracy and determine the feasibility of calculating absolute joint position.
While on the project, I used MATLAB to determine and display a real-time 3D visualization of the user’s leg position. The program was used during a demonstration of suit to the project's DARPA funding manager. I fabricated many components of the second generation of the sensor suit, making design decisions to improve on the issues the first generation suit faced. Finally, I conducted biomechanics research and developed a calibration procedure for the sensing suit to improve accuracy and determine the feasibility of calculating absolute joint position.
|
* All images and figures with respect to this project, including the graphic on the 'Project' page, are from:
Y. Mengüç, Y.-L. Park, E. Martinez-Villalpando, P. Aubin, M. Zisook, L. Stirling, R. J. Wood, and C. J. Walsh, “Soft Wearable Motion Sensing Suit for Lower Limb Biomechanics Measurements,” Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 5289-5296, 2013, Link 
|
|
© Ishan Chatterjee 2020
